Преобразователи частоты (ПЧ) и Устройств (0 товаров)
Купить Преобразователи частоты (ПЧ) и Устройств в компании Олниса можно оптом или в розницу. Доставим Преобразователи частоты (ПЧ) и Устройств в любой регион России. Можем предложить точный аналог. Работаем напрямую с производителем, не используя посредников.
Асинхронный мотор переменного тока часто называют рабочей лошадкой в отрасли, потому что он предлагает пользователям простую, прочную конструкцию, легкое обслуживание и экономичную цену. Эти факторы способствовали стандартизации и развитию производственной инфраструктуры, что привело к созданию обширной базы установленных двигателей; более 90% всех двигателей, используемых в мировой промышленности, являются асинхронными двигателями переменного тока.

Скольжение двигателя для создания крутящего момента
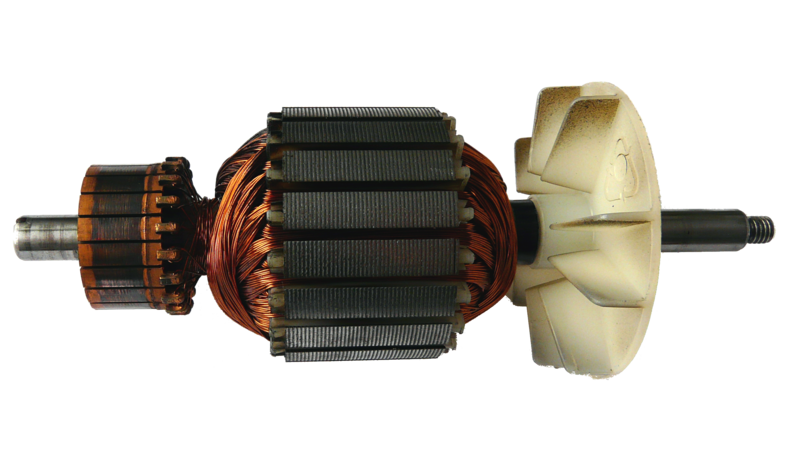
Асинхронный мотор переменного тока состоит из двух основных узлов: статора и ротора. Конструкция статора состоит из стальных пластин, имеющих форму полюсов. На эти полюса намотаны катушки из медной проволоки. Эти первичные обмотки подключены к источнику напряжения для создания вращающегося магнитного поля. Трехфазные двигатели с разнесением обмоток на 120 электрических градусов являются стандартными для промышленного, коммерческого и жилого использования.
Ротор - это еще один узел, состоящий из пластин поверх стального сердечника вала. В радиальных пазах по периферии пластин размещаются стержни ротора, которые представляют собой литые алюминиевые или медные проводники, закороченные на концах и расположенные параллельно валу. Расположение стержней ротора выглядит как беличья клетка, отсюда и широко известный термин «асинхронный мотор с беличьей клеткой». Термин «асинхронный двигатель» происходит от переменного тока (AC), который «индуцируется» в роторе посредством вращающегося магнитного потока, создаваемого в статоре.
Крутящий момент возникает в результате взаимодействия токов, протекающих в стержнях ротора, и вращающегося магнитного поля статора. В реальной работе скорость ротора всегда отстает от скорости магнитного поля, что позволяет стержням ротора разрезать магнитные силовые линии и создавать полезный крутящий момент. Эта разница скоростей называется скоростью скольжения. Скольжение также увеличивается с нагрузкой и необходимо для создания крутящего момента.
При малых значениях скольжения двигателя скольжение пропорционально сопротивлению ротора, частоте напряжения статора и крутящему моменту нагрузки. Он обратно пропорционален второй мощности напряжения питания. Традиционный способ управления скоростью асинхронного двигателя с фазным ротором состоит в увеличении скольжения путем добавления сопротивления в цепь ротора (например, с помощью преобразователей частоты (ПЧ) и других устройств Schneider Electric). Скольжение двигателей малой мощности выше, чем у двигателей большой мощности, из-за более высокого сопротивления обмотки ротора в двигателях меньшей мощности.
Меньшие двигатели и низкоскоростные двигатели обычно имеют более высокое относительное скольжение. Однако также доступны большие двигатели с высоким скольжением и малые двигатели с низким скольжением.
Можно видеть, что скольжение при полной нагрузке варьируется от менее 1% в двигателях с высокой мощностью до более 5% в двигателях с дробной мощностью. Эти изменения могут вызвать проблемы с распределением нагрузки при механическом соединении двигателей разных размеров. При низкой нагрузке разделение обычно не является проблемой, но при полной нагрузке мотор с меньшим скольжением берет на себя большую долю нагрузки, чем мотор с более высоким скольжением.
Относительно высокий импеданс ротора требуется для хорошей работы при пуске через линию или при полном напряжении. Другими словами, требуется высокий крутящий момент против низкого тока. Низкое сопротивление ротора также необходимо для низкой скорости скольжения при полной нагрузке и высокой эффективности работы.
Способы уменьшения скольжения
Синхронные, реактивные или двигатели с постоянными магнитами (PM) могут решить проблему скольжения, потому что в этих трех типах двигателей нет измеримого скольжения. Синхронные используются для приложений с очень большой и малой мощностью, но в меньшей степени в диапазоне средних мощностей, на который приходится много типичных промышленных приложений. Также используются реактивные, но их отношение мощности к массе не очень хорошее, поэтому они менее конкурентоспособны, чем асинхронные двигатели с короткозамкнутым ротором. Двигатели с постоянными магнитами, которые используются с электронными приводами с регулируемой скоростью (ASD), обеспечивают точное управление скоростью без проскальзывания, высокую эффективность с низкими потерями в роторе и гибкость в выборе очень низкой базовой скорости, устраняя необходимость в коробках передач. Однако двигатели с постоянными магнитами все еще ограничены некоторыми особенностями.
Выбор асинхронного двигателя переменного тока увеличенного размера - еще один способ уменьшить скольжение. Двигатели большего размера обычно изначально имеют меньшее значение скольжения, а скольжение становится меньше при частичной, а не полной нагрузке двигателя. Недостаток увеличения размера заключается в том, что мотор большего размера потребляет больше энергии, что увеличивает инвестиционные и эксплуатационные расходы.
Привод переменного тока с регулируемой скоростью часто является лучшим решением. Присущие асинхронной модели переменного тока ограничения могут быть решены с помощью ASD. Наиболее распространенные сегодня приводы переменного тока основаны на широтно-импульсной модуляции (ШИМ). Постоянное сетевое напряжение переменного тока с частотой 60 циклов в секунду от питающей сети выпрямляется, фильтруется и затем преобразуется в переменное напряжение и переменную частоту. Когда этот выход преобразователя частоты подключен к двигателю переменного тока, можно регулировать скорость двигателя.
При использовании привода переменного тока для регулировки скорости двигателя во многих случаях скольжение двигателя больше не является проблемой. Скорость двигателя не является основным параметром управления. Скорее, это может быть уровень жидкости, давление воздуха, температура газа или какой-либо другой регулирующий параметр.
Высокая точность статической скорости и / или точность динамической скорости по-прежнему требуются для многих приводов, таких как печатные машины, экструдеры, бумагоделательные машины, краны и лифты. Есть также много машин и конвейеров, где необходимо синхронизировать регулирование скорости - между секциями, приводимыми в движение отдельными двигателями. Вместо того, чтобы увеличивать размеры двигателей для устранения ошибки скорости, вызванной скольжением, может быть лучше использовать ряды секционных приводов с отдельными инверторами для каждого отдельного двигателя. Инверторы подключены к шине постоянного напряжения, питаемой от общего выпрямителя. Это очень энергоэффективное решение, поскольку приводные части механизма могут использовать энергию торможения от замедляющих частей (регенерация).
Гарантия и доставка
Купить переобразователи частоты (ПЧ) и устройств Schneider Electric можно в компании Олниса. Мы предлагаем промышленную технику от мировых производителей с доставкой по территории РФ и в страны СНГ. При покупке сохраняется полная гарантия от бренда-производителя. Минимальный срок доставки – от 1 суток (заказ – от 50 евро).